Yiming HuangI'm a PhD student (Fall 2024 - now) in Computer and Information Science at the University of Pennsylvania, affiliated with GRASP Lab. I am grateful to be advised by Prof. Lingjie Liu. My interests revolve broadly around the fields of vision, language, and robotics with a focus on the perception and modeling of human behavior in 3D environments. I received my master's degree in Robotics from GRASP Lab, University of Pennsylvania, where I had the honor to work with Prof. Lingjie Liu, Prof. Jianbo Shi and Prof. Mark Yatskar. I received my bachelor's degree in Mathematics and Computer Science from NYU Shanghai. |


|
Research(* indicates equal contribution) |
|
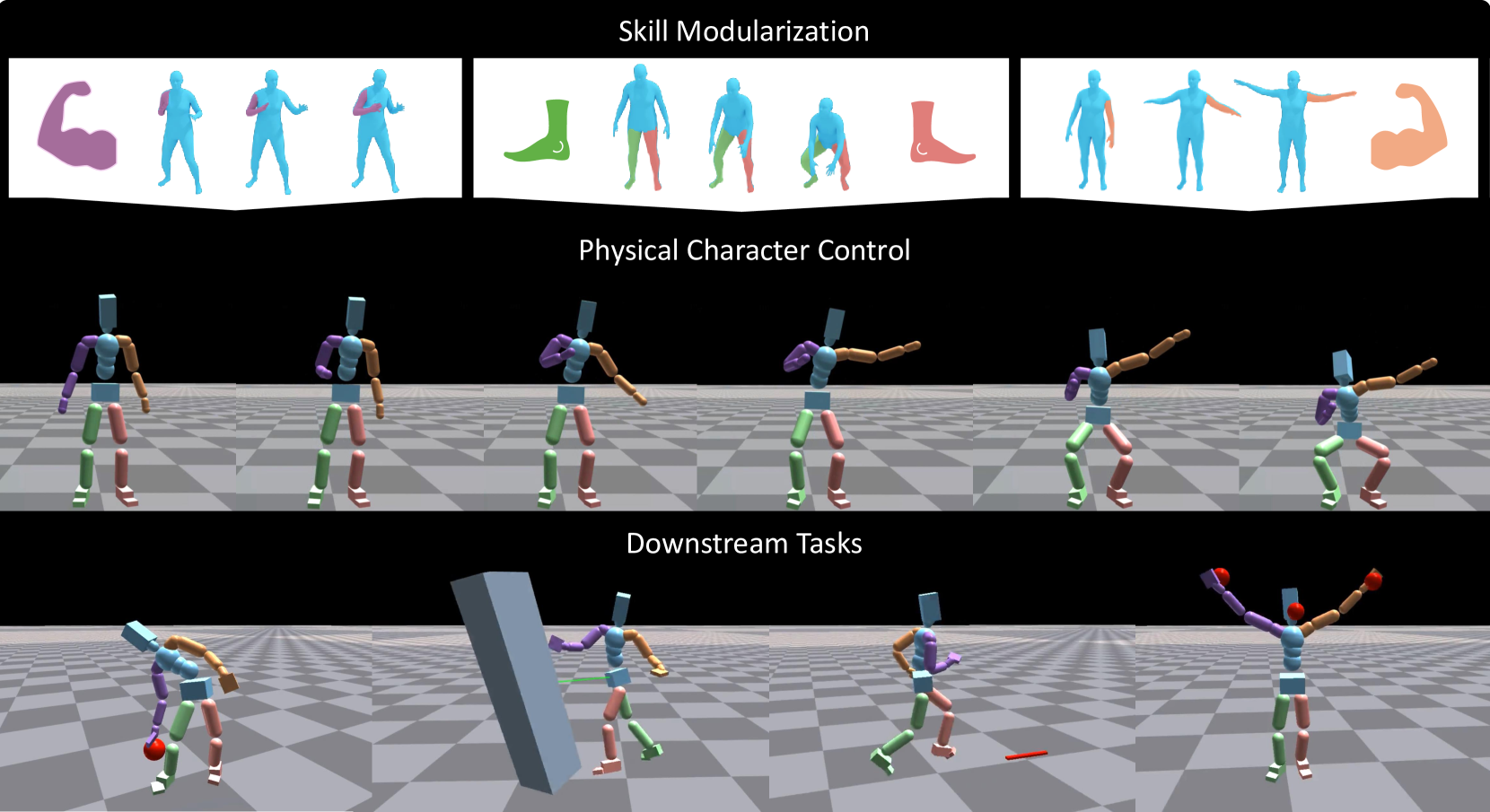
ModSkill: Physical Character Skill ModularizationYiming Huang, Zhiyang Dou, Lingjie Liu, ICCV 2025 arxiv / website / We introduce a novel skill learning framework, ModSkill, that decouples complex full-body skills into compositional, modular skills for independent body parts, leveraging body structure-inspired inductive bias to enhance skill learning performance. |
|
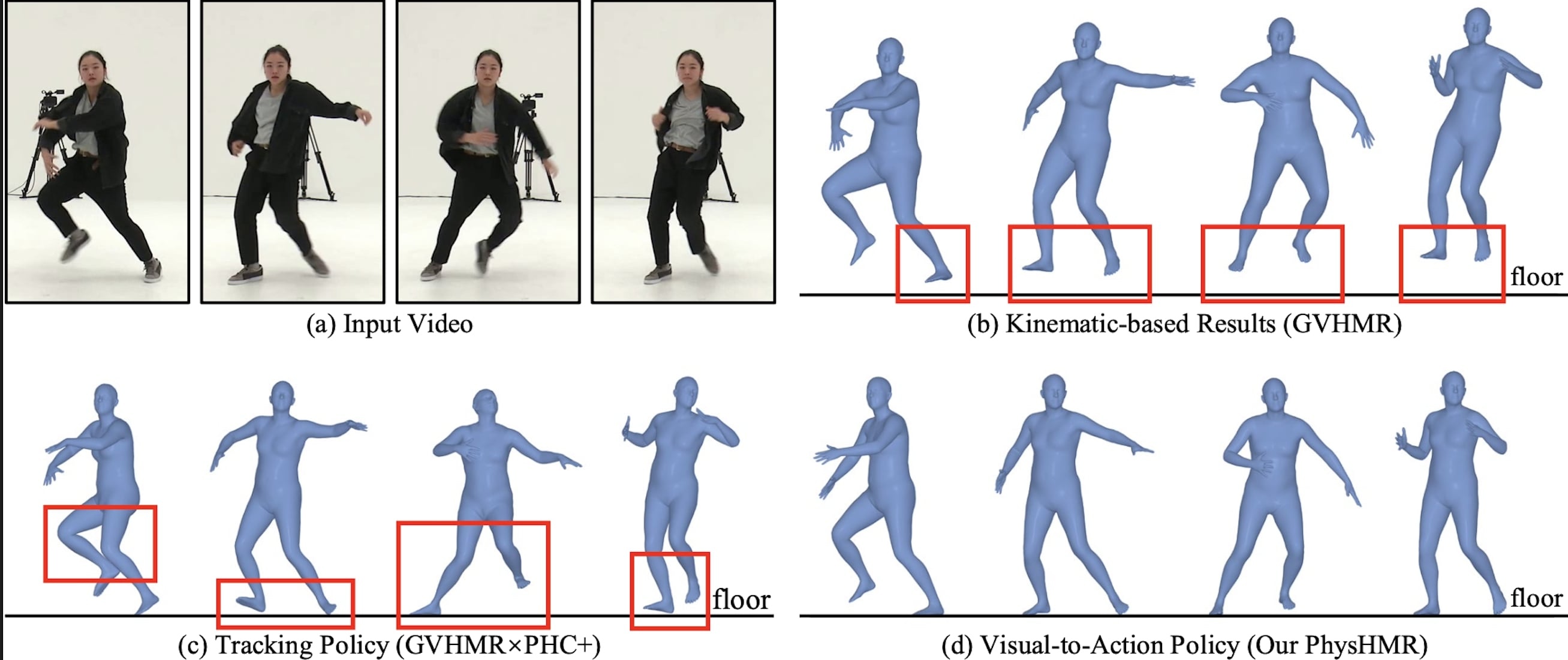
PhysHMR: Learning Humanoid Control Policies from Vision for Physically Plausible Human Motion ReconstructionQiao Feng, Yiming Huang, Yufu Wang, Jiatao Gu, Lingjie Liu, SIGGRAPH Asia 2025 (Conditionally Accepted) PhysHMR learns a visual-to-action policy that directly predicts control signals from visual input for physically plausible motion reconstruction. |
|
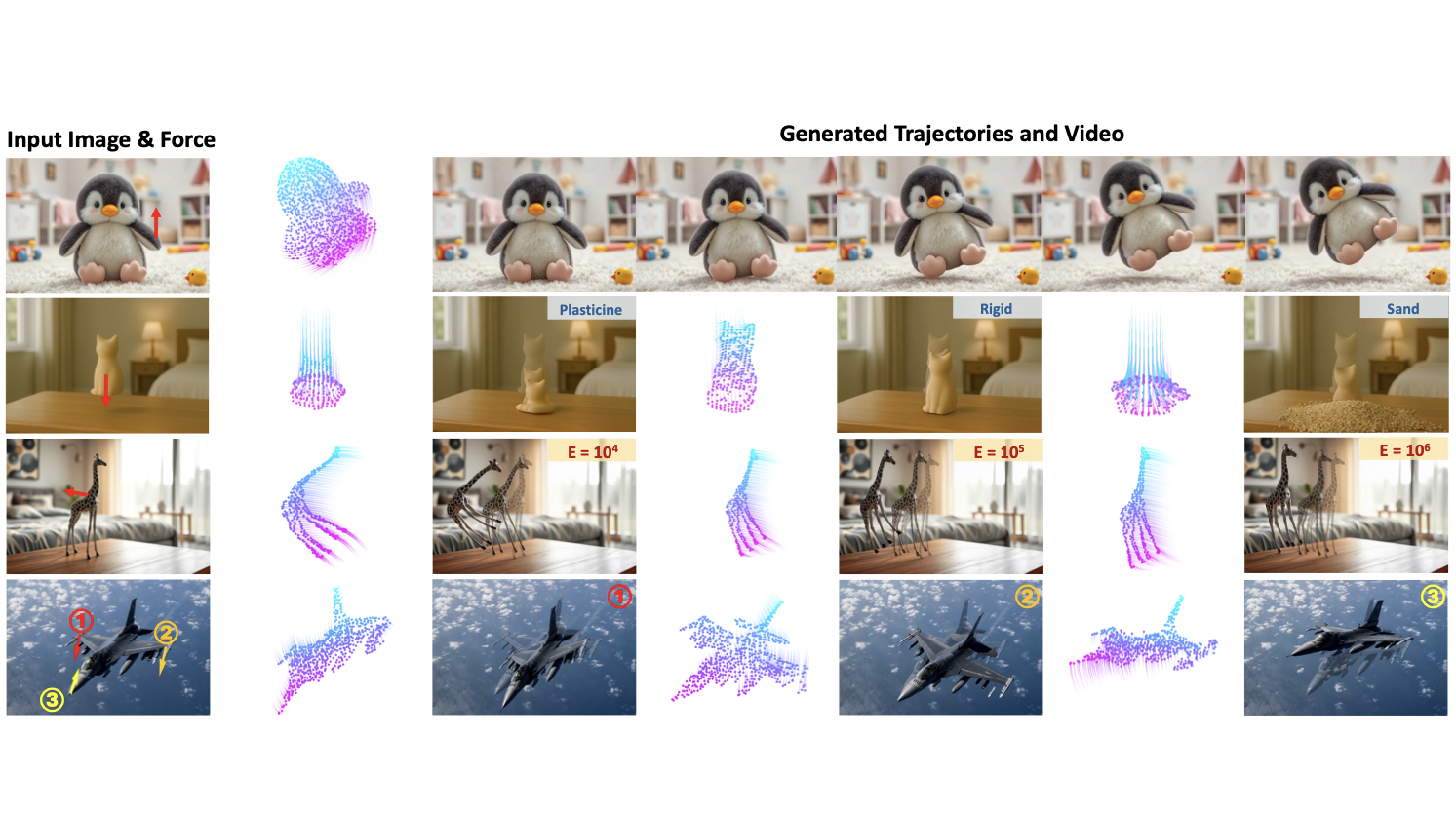
PhysCtrl: Generative Physics for Controllable and Physics-Grounded Video GenerationChen Wang*, Chuhao Chen*, Yiming Huang, Zhiyang Dou, Yuan Liu, Jiatao Gu, Lingjie Liu, NeurIPS 2025 website / PhysCtrl achieves controllable and physics-grounded video generation from an initial force input. |
|
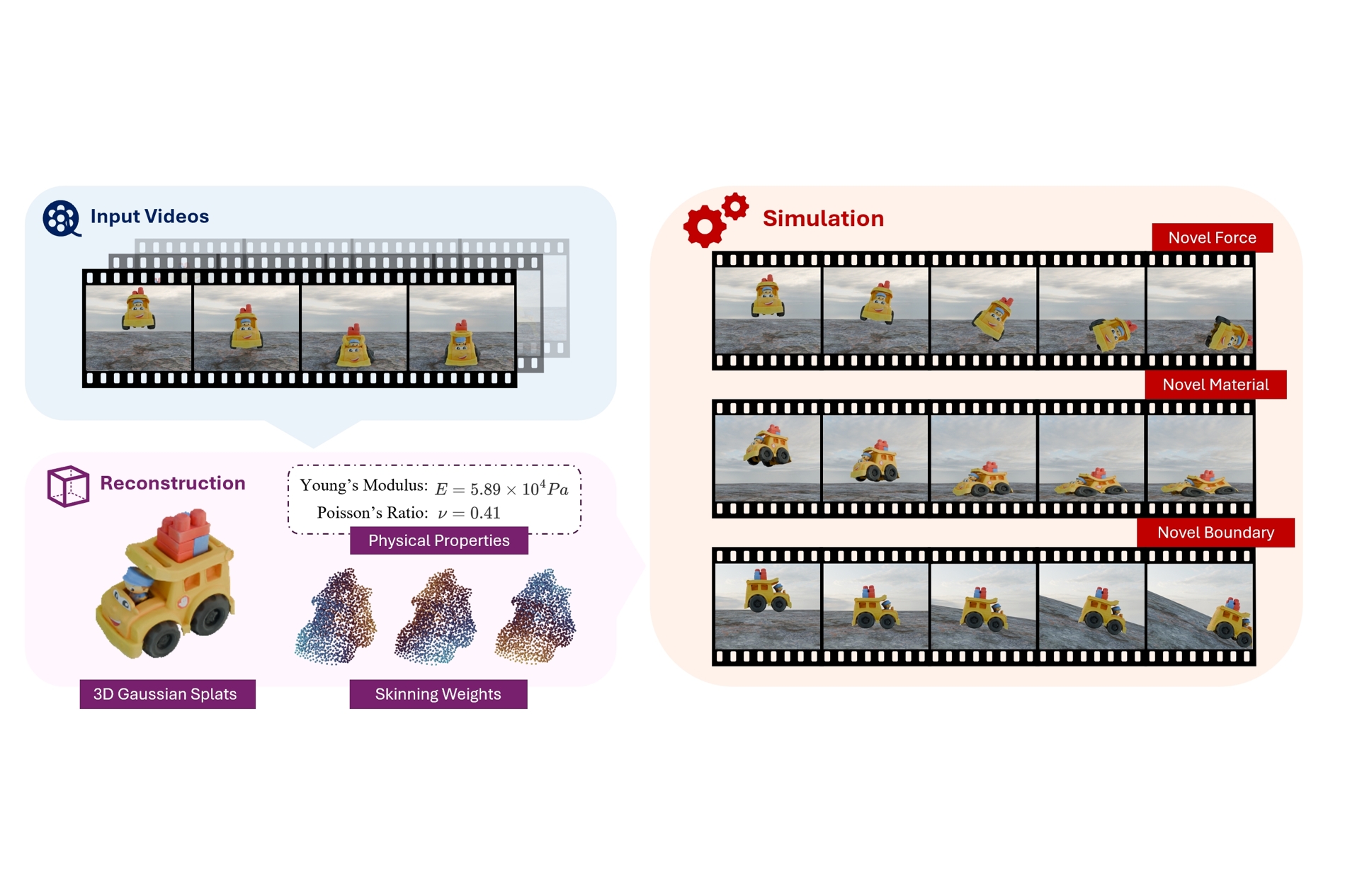
Vid2Sim: Generalizable, Video-based Reconstruction of Appearance, Geometry and Physics for Mesh-free SimulationChuhao Chen, Zhiyang Dou, Chen Wang, Yiming Huang, Anjun Chen, Qiao Feng, Jiatao Gu, Lingjie Liu, CVPR 2025 arxiv / code / website / Vid2Sim achieves high-quality, simulation-ready reconstruction of appearance, geometry, and physics from multi-view videos. |
|
CoMo: Controllable Motion Generation through Language Guided Pose Code EditingYiming Huang, Weilin Wan, Yue Yang, Chris Callison-Burch, Mark Yatskar, Lingjie Liu, ECCV 2024 arxiv / code / website / We present CoMo, a unified framework for fine-grained, text-driven human motion generation and editing using discrete and semantically meaningful pose codes. |
|
|
Ego-Exo4D: Understanding Skilled Human Activity from First-and Third-Person PerspectivesKristen Grauman, Andrew Westbury, (et al., including Yiming Huang) CVPR 2024 (Oral) arxiv / video / website / We present Ego-Exo4D, a diverse, large-scale multimodal multiview video dataset and benchmark challenge, centered around simultaneously-captured egocentric and exocentric video of skilled human activities (e.g., sports, music, dance, bike repair). |
|
DiffusionPhase: Motion Diffusion in Frequency DomainWeilin Wan* , Yiming Huang*, Shutong Wu, Taku Komura, Wenping Wang, Dinesh Jayaraman, Lingjie Liu arXiv 2023 arxiv / video / code / website / We propose a network encoder that converts motion sequences into periodic signals and a conditional diffusion model for predicting periodic motion parameters based on text descriptions and the starting pose, enabling the generation of a broader variety of high-quality longer motion sequences. |
Academic Service |
TeachingGraduate Teaching Assistant at the University of Pennsylvania: Course Development at the University of Pennsylvania: Undergraduate Teaching Assistant at NYU Shanghai Other: 2021-2022: Fablab O Shanghai STEAM Instructor |
Misc I enjoy doodling! I'm also a member of the Penn Enchord Acapella Group, check out some of our performances! Here's a small stash of some of my acapella arrangments :) |

|
|